Back زوايا أويلر Arabic Angles d'Euler Catalan Eulersche Winkel German Γωνίες Όιλερ Greek Euler angles English Ángulos de Euler Spanish Eulerren angeluak Basque زاویههای اویلر Persian Na huillinneacha Euler Irish זוויות אוילר HE
En mécanique et en mathématiques, les angles d'Euler sont des angles introduits par Leonhard Euler (1707-1783) pour décrire l'orientation d'un solide ou celle d'un référentiel par rapport à un trièdre cartésien de référence[1]. Au nombre de trois, ils sont appelés angle de précession, de nutation et de rotation propre[2],[1], les deux premiers pouvant être vus comme une généralisation des deux angles des coordonnées sphériques.
Le mouvement d'un solide par rapport à un référentiel (un avion dans l'air, un sous-marin dans l'eau, des skis sur une pente...) fait intervenir six paramètres, qui sont, par exemple, les trois coordonnées décrivant la position de son centre de masse (ou d'un point quelconque du solide) et les trois angles d'Euler, cf. les schémas ci-dessous.
Les angles d'Euler peuvent aussi servir à représenter l'orientation d'un solide par rapport à un repère (appelée aussi attitude en astronautique).
-
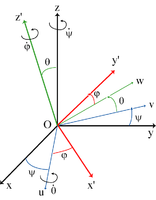 Angles d'Euler ψ, θ et φ. Le référentiel fixe est indiqué en noir, le référentiel mobile en rouge et la ligne des nœuds en bleu.
Angles d'Euler ψ, θ et φ. Le référentiel fixe est indiqué en noir, le référentiel mobile en rouge et la ligne des nœuds en bleu. -
 Autre représentation.
Autre représentation.





- Taillet, Villain et Febvre 2018, s.v.angles d'Euler, p. 30.
- Pérez 2014, p. xxi et 275.
© MMXXIII Rich X Search. We shall prevail. All rights reserved. Rich X Search